1)前面我们已经完整的导出了整个场景的内容,接下来我们将导出寻路功能中的网格数据,这部分数据也是通过unity插件内功能实现导出的。
2)我们打开Example文件夹下的Example_7场景文件,目录位置如图所示:
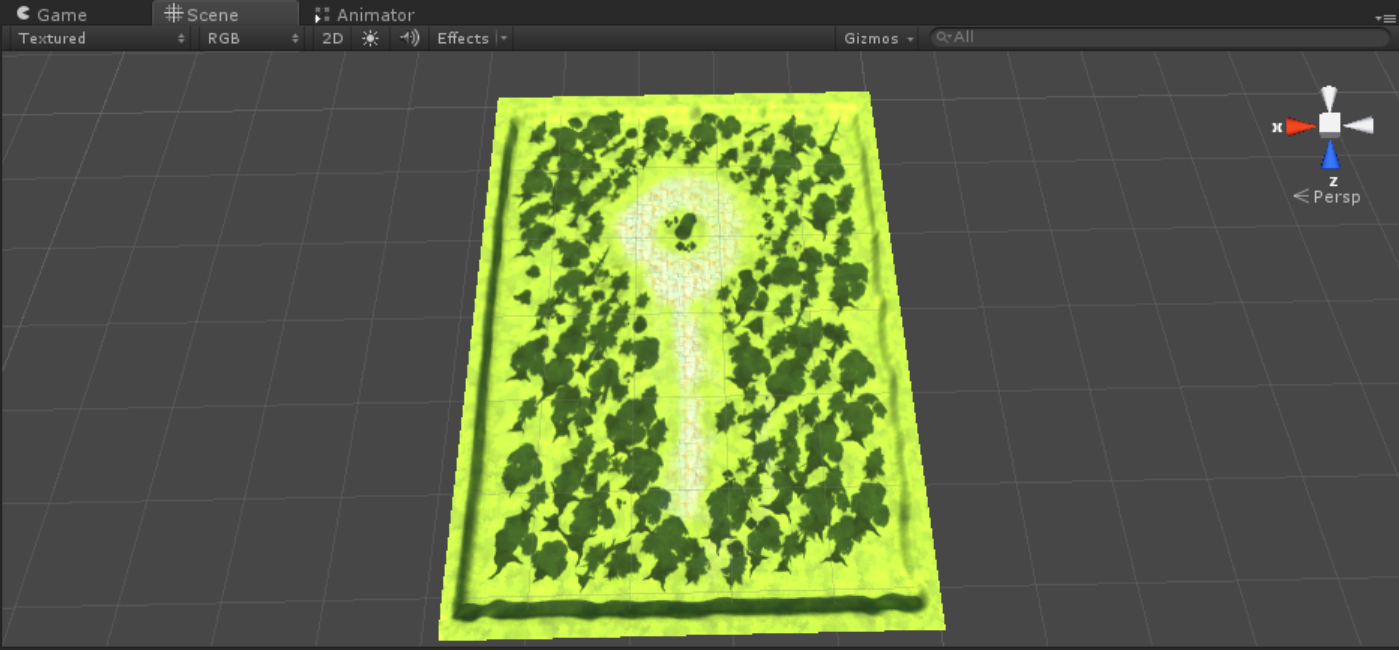
3)场景内容如图示:
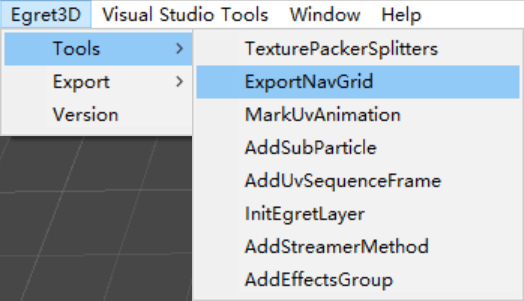
4)然后我们选择菜单栏Egret3D-->Export-->ExportNavGrid步骤打开导出场景功能块。
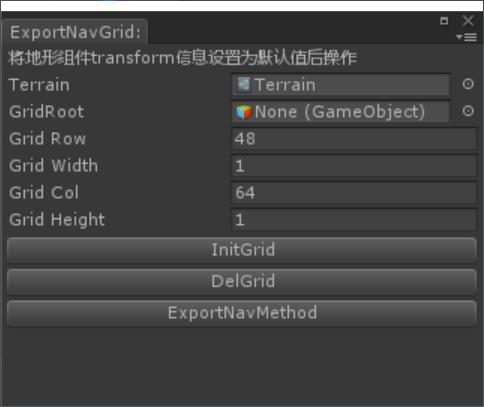
5)功能界面如下图,详细参数说明:
a) terrain: 导出nav地形数据的地形组件对象,初始值为第一个索引到的地形组件。
b) gridRoot: 绘制后生成的地形数据根节点,一般不做修改,初始值为空。
c) gridWidth: 绘制网格的宽,一般使用默认值。
d) gridHeight: 绘制网格的高,一般使用默认值。
e) gridRow: 地形宽的格子总数,一般使用默认值。
f) gridCol: 地形长的格子总数,一般使用默认值。
g) 当全部使用默认值导出时,即生成一个和地形大小近似的网格,单个网格大小约为1m*1m。
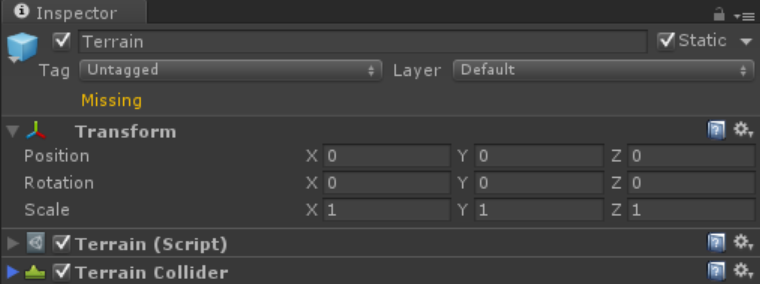
h) 需要注意的是,请确保terrain组件对象的transform信息为默认值,如下图所示:
6)确认参数无误后,点击InitGrid按钮生成网格。
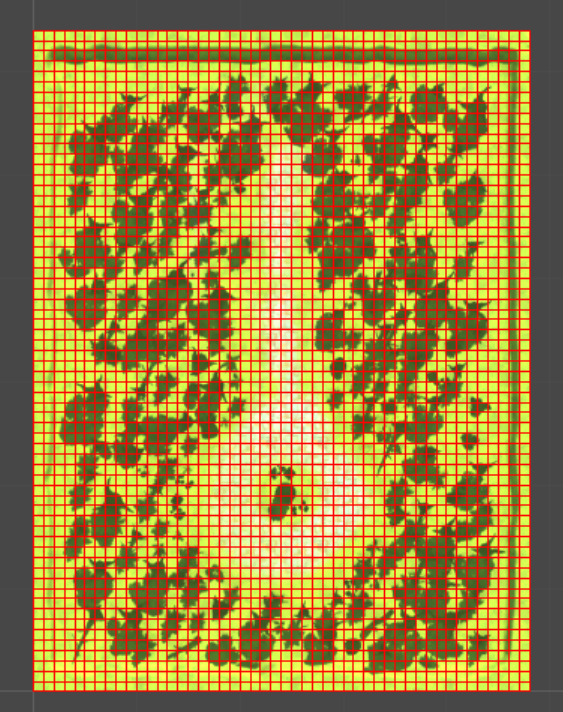
7)鼠标点击选中sence内的网格,就可以开始绘制网格数据。
a) 按住按键1后滑动鼠标,可以绘制可行走区域。
b) 按住按键3后滑动鼠标,可以取消可行走区域。
8)绘制完成后,可以点击ExportNavMethod导出nav数据,文件名为场景名+.nav,保存位置如下图所示:
9)数据导出测试无误后,可以手动设置Grid(Clone)对象active为false,也可以使用DelGrid删除地形数据。
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}